Yaskawa Electric Servo Motor InsB 200V SJME-04AMB41-0Y 400W Servo Motor Industri
Spesifikasi
Saat ini: 2.0A
Tegangan: 200V
Kekuatan: 400W
Torsi nominal: 1,27N-m
Kecepatan maksimum: 3000 rpm
Encoder: 17bit Absolute encoder
Beban Inertia JL kgm2 10-4: 0.026
Poros: lurus tanpa kunci
Produk-produk unggulan lainnya
Motor Yasakawa, Pengemudi SG- Mitsubishi Motor HC-, HA-
Modul Westinghouse 1C, 5X- Emerson VE, KJ-
Honeywell TC-, TK- Fanuc motor A0-
Rosemount 3051- Yokogawa pemancar EJA-
Orang kontak: Anna
Email: wisdomlongkeji@163.com
Nomor telepon: +0086-13534205279
SProduk-produk
SJDE-01APA
SJDE-02APA
SJDE-04APA
SJDE-04APA+SJME-04AMB41
SJDE-08APA
SJME-01AMA41
SJME-04AMA41
SJME-04AWA41
SJME-08AWA41
Inverter terdiri dari tiga unit setengah jembatan di mana atas dan bawah saklar dikendalikan secara komplementer, yang berarti ketika yang atas dihidupkan, yang bawah harus dimatikan,dan sebaliknyaKarena waktu mati perangkat daya lebih lama dari waktu hidup,beberapa waktu mati harus dimasukkan antara waktu satu transistor dari setengah jembatan dimatikan dan perangkat pelengkapnya dihidupkanTegangan output sebagian besar dibuat oleh teknik Modulasi Lebar Pulsa (PWM), di mana gelombang pembawa segitiga sama kaki dibandingkan dengan gelombang modulasi sinus frekuensi dasar.Titik persimpangan alami menentukan titik beralih dari perangkat daya dari inverter setengah jembatanTeknik ini ditunjukkan dalam Gambar 3-6. gelombang tegangan 3 fase bergeser 120o satu sama lain dan dengan demikian motor 3 fase dapat diberikan
Perangkat daya yang paling populer untuk aplikasi kontrol motor adalah Power MOSFET dan IGBT.Ini dirancang untuk operasi frekuensi tinggi dan memiliki penurunan tegangan rendahNamun, sensitivitas suhu jenuh membatasi penggunaan MOSFET dalam aplikasi bertenaga tinggi.Transistor Bipolar Isolated-Gate (IGBT) dikendalikan oleh MOSFET di alasnyaIGBT membutuhkan arus drive yang rendah, memiliki waktu switching yang cepat, dan cocok untuk frekuensi switching yang tinggi.menyebabkan kerugian konduksi yang lebih tinggi.

Kontrol vektor adalah teknik kontrol yang paling populer dari motor induksi AC.Ekspresi untuk torsi elektromagnetik dari mesin air-gap halus mirip dengan ekspresi untuk torsi dari mesin DC yang terinspirasi secara terpisahDalam hal mesin induksi, kontrol biasanya dilakukan dalam kerangka acuan (d-q) yang melekat pada vektor ruang fluks rotor.Itulah mengapa pelaksanaan kontrol vektor membutuhkan informasi tentang modulus dan sudut ruang (posisi) dari rotor fluks vektor ruangArus stator mesin induksi dipisahkan menjadi komponen yang menghasilkan fluks dan torsi dengan menggunakan transformasi ke sistem koordinat d-q,yang sumbu lurus (d) sejajar dengan vektor ruang fluks rotorItu berarti bahwa komponen sumbu q dari vektor ruang fluks rotor selalu nol:

 Pesan Anda harus antara 20-3.000 karakter!
Pesan Anda harus antara 20-3.000 karakter!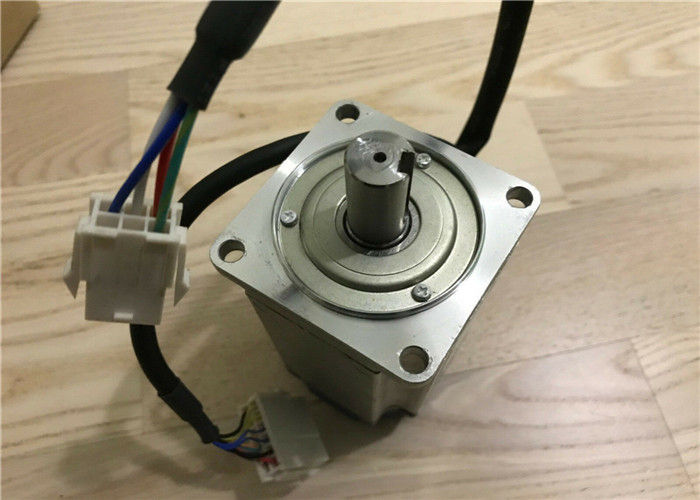
Peringkat Umum
Cuplikan Penilaian
Berikut ini adalah distribusi semua peringkatSemua Ulasan