Motor Servo Industri Yaskawa Electric 4500 W 1500 RPM SERVO MOTOR SGMDH-45A2B-YR14
Rincian Cepat
Model SGMDH-45A2B-YR14
Jenis Produk AC Servo Motor
Nominal output 4500w
Torsi nominal 28,4Nm
Kecepatan nominal 1500RPM
Tegangan Pasokan Daya 200vAC
Listrik nominal 32,4 Amps
Produk-produk unggulan lainnya
Motor Yasakawa, Pengemudi SG- Mitsubishi Motor HC-, HA-
Modul Westinghouse 1C, 5X- Emerson VE, KJ-
Honeywell TC-, TK- Fanuc motor A0-
Rosemount 3051- Yokogawa pemancar EJA-
Produk serupa
| SGMDH |
deskripsi |
produsen |
| SGMDH-056A2A-YR25 |
SGMDH056A2AYR25 SERVO MOTOR |
yaskawa |
| SGMDH-06A2 |
SGMDH06A2 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-TR25 |
SGMDH06A2ATR25 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR |
SGMDH06A2AYR SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR11 |
SGMDH06A2AYR11 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR12 |
SGMDH06A2AYR12 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR13 |
SGMDH06A2AYR13 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR14 |
SGMDH06A2AYR14 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR24 |
SGMDH06A2AYR24 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR25 |
SGMDH06A2AYR25 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR26 |
SGMDH06A2AYR26 2.63NM 550W 4AMP 2000RPM 200V |
yaskawa |
| SGMDH-12A2 |
SGMDH12A2 SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YA14 |
SGMDH12A2AYA14 SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YR |
SGMDH12A2AYR SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YR12 |
SGMDH12A2AYR12 SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YR13 |
SGMDH12A2AYR13 AC 2000RPM 1150W 200V 7.3AMP 5.49NM |
yaskawa |
| SGMDH-12A2A-YR14 |
SGMDH12A2AYR14 SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YR15 |
SGMDH12A2AYR15 SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YR21 |
SGMDH12A2AYR21 SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YRA1 |
SGMDH12A2AYRA1 SERVO MOTOR |
yaskawa |
| SGMDH-13A2A-YR23 |
SGMDH13A2AYR23 SERVO MOTOR |
yaskawa |
| SGMDH-20A2A21 |
SGMDH20A2A21 SERVO MOTOR |
yaskawa |
| SGMDH-22A2 |
SGMDH22A2 SERVO MOTOR |
yaskawa |
| SGMDH-22A2A-YR11 |
SGMDH22A2AYR11 SIGMA II 2.2KW L/U AXIS SK45X |
yaskawa |
| SGMDH-22A2A-YR12 |
SGMDH22A2AYR12 SERVO MOTOR |
yaskawa |
| SGMDH-22A2A-YR13 |
SGMDH22A2AYR13 SERVO MOTOR |
yaskawa |
| SGMDH-22A2A-YR13YA |
SGMDH22A2AYR13YA SERVO MOTOR |
yaskawa |
| SGMDH-22A2A-YR14 |
SGMDH22A2AYR14 SERVO MOTOR |
yaskawa |
| SGMDH-22A2A-YR32 |
SGMDH22A2AYR32 SERVO MOTOR |
yaskawa |
| SGMDH-22ACA61 |
SGMDH22ACA61 SERVO MOTOR |
yaskawa |
| SGMDH-30A2A-YR31 |
SGMDH30A2AYR31 SERVO MOTOR |
yaskawa |
| SGMDH-30A2A-YR32 |
SGMDH30A2AYR32 SERVO MOTOR |
yaskawa |
| SGMDH-32A2 |
SGMDH32A2 SERVO MOTOR |
yaskawa |
| SGMDH-32A2A |
SGMDH32A2A SERVO MOTOR |
yaskawa |
| SGMDH-32A2A-YA14 |
SGMDH32A2AYA14 SERVO MOTOR |
yaskawa |
| SGMDH-32A2A-YR11 |
SGMDH32A2AYR11 SERVO MOTOR |
yaskawa |
| SGMDH-32A2A-YR12 |
SGMDH32A2AYR12 SERVO MOTOR |
yaskawa |
| SGMDH-32A2A-YR13 |
SGMDH32A2AYR13 AC 3.2KW SIGMA 2 S-AXIS |
yaskawa |
| SGMDH-32A2A-YR14 |
SGMDH32A2AYR14 SERVO MOTOR |
yaskawa |
| SGMDH-32A2A-YR51 |
SGMDH32A2AYR51 SERVO MOTOR |
yaskawa |
| SGMDH-32A2A-YRA1 |
SGMDH32A2AYRA1 SERVO MOTOR |
yaskawa |
| SGMDH-32ACA-MK11 |
SGMDH32ACAMK11 SERVO MOTOR |
yaskawa |
| SGMDH-32P5A |
SGMDH32P5A SERVO MOTOR |
yaskawa |
| SGMDH-40A2 |
SGMDH40A2 SERVO MOTOR |
yaskawa |
| SGMDH-40A2A |
SGMDH40A2A SERVO MOTOR |
yaskawa |
| SGMDH-40ACA21 |
SGMDH40ACA21 SERVO MOTOR |
yaskawa |
| SGMDH-44A2A-YR14 |
SGMDH44A2AYR14 SERVO MOTOR |
yaskawa |
| SGMDH-44A2A-YR15 |
SGMDH44A2AYR15 SERVO MOTOR |
yaskawa |
| SGMDH-45A2A6C |
SGMDH45A2A6C SERVO MOTOR |
yaskawa |
| SGMDH-45A2B61 |
SGMDH45A2B61 SERVO MOTOR |
yaskawa |
| SGMDH-45A2BYR |
SGMDH45A2BYR SERVO MOTOR |
yaskawa |
| SGMDH-45A2B-YR13 |
SGMDH45A2BYR13 SERVO MOTOR |
yaskawa |
| SGMDH-45A2BYR14 |
SGMDH45A2BYR14 SERVO MOTOR |
yaskawa |
| SGMDH-45A2B-YR14 |
SGMDH45A2BYR14 SERVO MOTOR |
yaskawa |
| SGMDH-45A2BYR15 |
SGMDH45A2BYR15 SERVO MOTOR |
yaskawa |
| SGMDH-45A2B-YR15 |
SGMDH45A2BYR15 SERVO MOTOR |
yaskawa |
| SGMDH-6A2A-YR13 |
SGMDH6A2AYR13 SERVO MOTOR |
yaskawa |
| SGMDH-6A2A-YR25 |
SGMDH6A2AYR25 SERVO MOTOR |
yaskawa |
| SGMDH-A2 |
SGMDHA2 SERVO MOTOR |
yaskawa |
| SGMDH-A2A |
SGMDHA2A SERVO MOTOR |
yaskawa |
• Dengan menutup loop kecepatan serta loop posisi di komputer, satu perangkat umpan balik dapat digunakan untuk keduanya.Pendekatan komputer per sumbu bermanfaat jika tingkat pembaruan yang sangat tinggi dipilih untuk loop kecepatanDengan beberapa sumbu, beban pada komputer pusat mungkin terlalu besar dengan kecepatan update loop tinggi.
• Jika banyak gerakan terkoordinasi diantisipasi, sebuah komputer pusat akan memiliki akses langsung ke setiap sumbu.tautan komunikasi komputer ke komputer menyebabkan keterlambatan yang membatasi koordinasi yang erat. loop kecepatan dapat tetap analog dengan pendekatan komputer pusat untuk memudahkan ini.
Bode diagram, seperti yang ditunjukkan di bawah ini, membantu untuk mengukur seberapa baik output, atau umpan balik (F), mengikuti perintah (C) dengan menunjukkan hubungan antara A dan frekuensi rangsangan.Frekuensi biasanya dinyatakan dalam radian/detik.(ω) daripada siklus per detik (f). Karena ω = 2πf ≈ 6.28 f, mudah dikonversi dari satu ke yang lain. Juga, 1/ω, dalam detik, adalah konstanta waktu dari filter low pass dengan bandwidth f.Setelah kita tahu bandwidth (ω) dari servo, kita tahu konstanta waktu dari filter setara (1/ω) dan dengan demikian dapat memprediksi tanggapannya terhadap input langkah.
Untuk apa motor stepper bagus?
Posisi Karena steppers bergerak dalam langkah-langkah yang tepat dapat diulang, mereka unggul dalam aplikasi yang membutuhkan
beberapa drive disk juga menggunakan motor stepper untuk memposisikan kepala baca / tulis.
Kontrol Kecepatan Pergerakan yang tepat juga memungkinkan kontrol yang sangat baik dari kecepatan rotasi untuk
proses otomatisasi dan robotika.
Torsi Kecepatan Rendah - Motor DC normal tidak memiliki banyak torsi pada kecepatan rendah.
torsi maksimum pada kecepatan rendah, sehingga mereka adalah pilihan yang baik untuk aplikasi yang membutuhkan kecepatan rendah dengan kecepatan tinggi
Keakuratan.
Banyak pengguna kontrol gerak telah mendengar vendor mencoba untuk menjelaskan fitur servo tertentu dengan menggunakan diagram Bode. pemahaman dasar dari mereka diperlukan dalam menangani gerakan.Pengucapan yang tepat adalah "Bo-dee"Anda akan menemukan kesamaan lain antara keduanya (siapa yang saya mainkan?) seperti angka 10, seperti yang akan kita lihat.

 Pesan Anda harus antara 20-3.000 karakter!
Pesan Anda harus antara 20-3.000 karakter!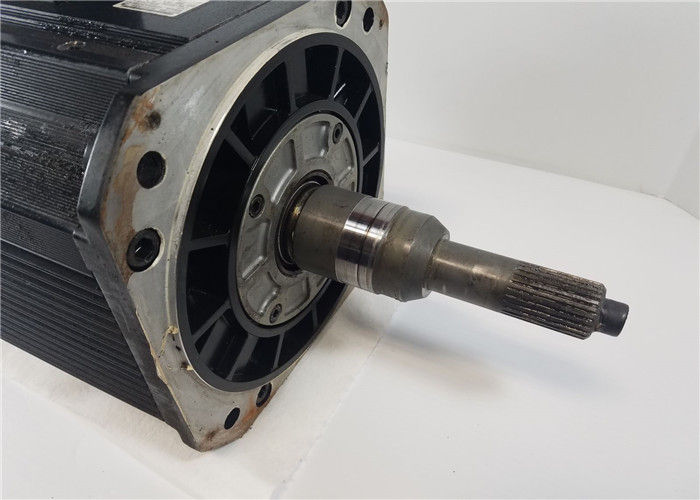
Peringkat Umum
Cuplikan Penilaian
Berikut ini adalah distribusi semua peringkatSemua Ulasan