Motor servo industri Yaskawa ELECTRIC 50W AC SERVO MOTOR SGMAH-A5AAAYU41
Rincian Cepat
Model SGMAH-A5AAAYU41
Jenis Produk AC Servo Motor
Kekuatan nominal 50w
Torsi nominal 0,159 Nm
Kecepatan nominal 3000RPM
Tegangan Pasokan Daya 200vAC
Listrik nominal 0,64 Amps
Produk serupa
| SGMAH-01A1A21 |
| SGMAH-01A1A2B |
| SGMAH-01A1A2C |
| SGMAH-01A1A41 |
| SGMAH-01A1A4B |
| SGMAH-01A1A4C |
| SGMAH-01A1A61D-OY |
| SGMAH-01A1A-AD11 |
| SGMAH-01A1A-FJ61 |
| SGMAH-01A1A-SM11 |
| SGMAH-01A1A-SM21 |
| SGMAH-01AAA21 |
| SGMAH-01AAA21-Y2 |
| SGMAH-01AAA2B |
| SGMAH-01AAA2C |
| SGMAH-01AAA41 |
| SGMAH-01AAA4B |
| SGMAH-01AAA4C |
| SGMAH-01AAA4CH |
| SGMAH-01AAA61 |
| SGMAH-01AAA61D-OY |
| SGMAH-01AAACH |
| SGMAH-01AAAG761 + SGDM-01ADA |
| SGMAH-01AAAH12C |
| SGMAH-01AAAH161 |
| SGMAH-01AAAH161-E |
| SGMAH-01ACA-SW11 |
| SGMAH-01B1A2S |
| SGMAH-01B1A41 |
| SGMAH-01BAA21 |
| SGMAH-01BAA41 |
| SGMAH-01BBA21 |
| SGMAH-01BBABC |
| SGMAH-01BBA-TH12 |
| SGMAH-02A1A21 |
| SGMAH-02A1A61D-0Y |
| SGMAH-02A1A6B |
| SGMAH-02A1A6C |
| SGMAH-02A1A-DH12 |
| SGMAH-02A1A-DH21 |
| SGMAH-02A1AG161 |
| SGMAH-02A1A-SM11 |
| SGMAH-02A1A-SM21 |
| SGMAH-02A1A-YR21 |
| SGMAH-02AAA21 |
| SGMAH-02AAA21/SGMAH-02AAA41 |
| SGMAH-02AAA21-Y1 |
| SGMAH-02AAA2B |
| SGMAH-02AAA2C |
| SGMAH-02AAA2C-Y2 |
| SGMAH-02AAA41 |
| SGMAH-02AAA4C |
Perlindungan Tegangan Rendah
Low Voltage Disconnects - Perangkat perlindungan berfungsi untuk memutus sambungan motor ketika tegangan pasokan turun di bawah nilai yang ditetapkan sebelumnya.Motor harus dihidupkan kembali secara manual setelah kembali ke tegangan pasokan normal.
Low Voltage Release - Perangkat perlindungan mengganggu sirkuit ketika tegangan pasokan turun di bawah nilai yang telah ditetapkan dan membangun kembali sirkuit ketika tegangan pasokan kembali normal.
Perlindungan kegagalan fase
Memutus daya di semua fase sirkuit tiga fase pada kegagalan salah satu fase.
C Perlindungan peleburan dan overload normal mungkin tidak cukup melindungi motor polifase dari kerusakan operasi fase tunggal.motor akan terus beroperasi jika salah satu fase hilang.
C Arus besar dapat dikembangkan di sirkuit stator yang tersisa yang akhirnya terbakar.
Perlindungan kegagalan fase C adalah satu-satunya cara yang efektif untuk melindungi motor dengan benar dari fase tunggal.
Apa yang Dibutuhkan untuk Mempertahankan Keakuratan Selama Gerakan Terkoordinasi?
Besarnya kesalahan tidak masalah jika jalur yang diikuti adalah gerakan sumbu tunggal. sumbu akan mengikuti perintah bergerak, tetapi akan mengejar ketika titik akhir tercapai.Tidak bisa dideteksiKetika dua sumbu dipindahkan secara bersamaan untuk menghasilkan potongan lurus miring, kesalahan besar dapat berkembang.Gambar 2 menunjukkan gerakan dua sumbu di sepanjang kemiringan 45° di mana
kedua X dan Y diperintahkan pada kecepatan yang sama. keuntungan sumbu X adalah dua kali dari sumbu Y, sehingga kesalahan sumbu X (EX) adalah setengah dari kesalahan sumbu Y (EY).Jalur yang dihasilkan di pindahkan dari yang diperintahkan tergantung pada arah, kecepatan, keuntungan dan sudut kemiringan Jika keuntungan dari dua sumbu dalam contoh yang sama, EX dan EY akan sama dan mesin akan tertinggal perintah bergerak,tapi itu akan tepat di jalur yang diinginkan. Itu akan mengejar ketika perintah berhenti di titik akhir. sekali keuntungan yang tepat dicocokkan, arah, kecepatan dan sudut kemiringan tidak lagi penting.Selama jalur yang diperintahkan tetap di garis lurus, poros akan selalu tertinggal, tapi tepat pada garis itu.Ini akan membutuhkan detuning sumbu yang lebih responsif untuk cocok dengan yang paling buruk kinerjaBanyak sistem memungkinkan keuntungan untuk diatur secara digital (dan dengan demikian tepat).Pengaturan ini dilakukan dengan memerintahkan setiap sumbu pada nilai rentang menengah yang sama dan menyesuaikan potensiometer untuk mencapai kesalahan yang sama.
Gerakan melingkar, di mana jalur yang diperintahkan dihasilkan oleh interpolasi melingkar, adalah cerita lain.Dengan keuntungan yang setara, lingkaran akan selalu dihasilkan, tetapi tidak selalu dari ukuran yang diperintahkan. Dengan kecepatan rendah dan radius lingkaran tinggi, kesalahan tidak dapat diabaikan, namun, sebagai rasio kecepatan untuk radius lingkaran meningkat,kesalahan dalam ukuran lingkaran
Ini menimbulkan pertanyaan: Apakah lingkaran yang dihasilkan akan lebih besar atau lebih kecil dari yang diperintahkan?
(Pikirkan ini sebelum membaca lebih lanjut.)

Produk-produk unggulan lainnya
Motor Yasakawa, Pengemudi SG- Mitsubishi Motor HC-, HA-
Modul Westinghouse 1C, 5X- Emerson VE, KJ-
Honeywell TC-, TK- Fanuc motor A0-
Rosemount 3051- Yokogawa pemancar EJA-

 Pesan Anda harus antara 20-3.000 karakter!
Pesan Anda harus antara 20-3.000 karakter!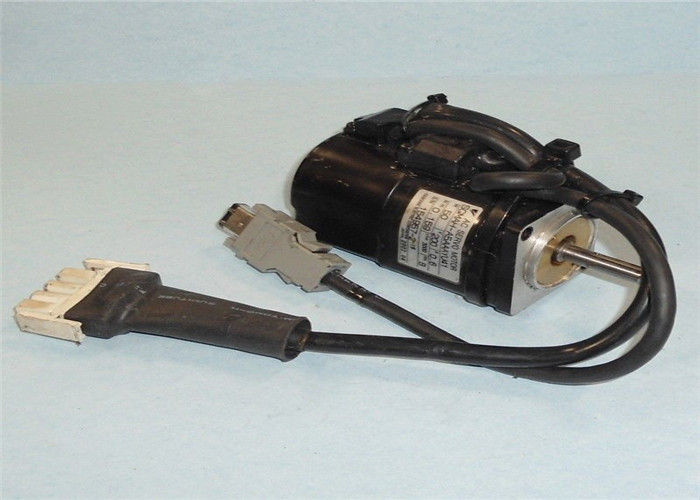
Peringkat Umum
Cuplikan Penilaian
Berikut ini adalah distribusi semua peringkatSemua Ulasan