SGMAH Sigma II Japan YASKAWA 0.637N.m SERVOMOTOR INsB SGMAH-02AAN21
Spesifikasi
Model SGMAH-02AAN21
Jenis Produk Motor Servo AC
Output Terukur 200w
Torsi Terukur 0.637 Nm
Kecepatan Terukur 3000RPM
Tegangan Catu Daya 200vAC
Arus Terukur 2.1 Amps
PRODUK UNGGULAN LAINNYA
Motor Yasakawa, Driver SG- Motor Mitsubishi HC-,HA-
Modul Westinghouse 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Motor Fanuc A0-
Pemancar Rosemount 3051- Pemancar Yokogawa EJA-
SProduk Serupa
SGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2E
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
Tidak seperti motor dc, dengan motor servo Anda dapat memposisikan poros motor pada posisi tertentu (sudut) menggunakan sinyal kontrol. Poros motor akan bertahan pada posisi ini selama sinyal kontrol tidak berubah. Ini sangat berguna untuk mengendalikan lengan robot, permukaan kontrol pesawat terbang tanpa awak, atau objek apa pun yang Anda inginkan untuk bergerak pada sudut tertentu dan tetap pada posisi barunya.
Motor servo dapat diklasifikasikan menurut ukuran atau torsi yang dapat ditahannya menjadi servo mini, standar, dan raksasa. Biasanya motor servo ukuran mini dan standar dapat ditenagai oleh Arduino secara langsung tanpa perlu catu daya atau driver eksternal.
Biasanya motor servo dilengkapi dengan lengan (logam atau plastik) yang terhubung ke objek yang perlu dipindahkan (lihat gambar di bawah ke kanan).
Pin ketiga menerima sinyal kontrol yang merupakan sinyal modulasi lebar pulsa (PWM). Itu dapat dengan mudah dihasilkan oleh semua mikrokontroler dan papan Arduino.
Ini menerima sinyal dari pengontrol Anda yang memberi tahu sudut mana yang harus diputar. Sinyal kontrol cukup sederhana dibandingkan dengan motor stepper. Itu hanya pulsa dengan panjang yang bervariasi. Panjang pulsa sesuai dengan sudut motor berputar.
Diagram Blok Kontrol Motor Servo
Sinyal pulsa yang diterapkan secara eksternal (ketika itu adalah jenis input pulsa) dan rotasi yang dideteksi oleh encoder motor servo dihitung, dan perbedaannya (deviasi) dikeluarkan ke unit kontrol kecepatan. Penghitung ini disebut sebagai penghitung deviasi.
Selama rotasi motor, pulsa terakumulasi (deviasi posisi) dihasilkan dalam penghitung deviasi dan dikontrol agar menjadi nol.
Fungsi untuk menahan posisi saat ini (penahanan posisi dengan kontrol servo) dicapai dengan loop posisi (penghitung deviasi).

 Pesan Anda harus antara 20-3.000 karakter!
Pesan Anda harus antara 20-3.000 karakter!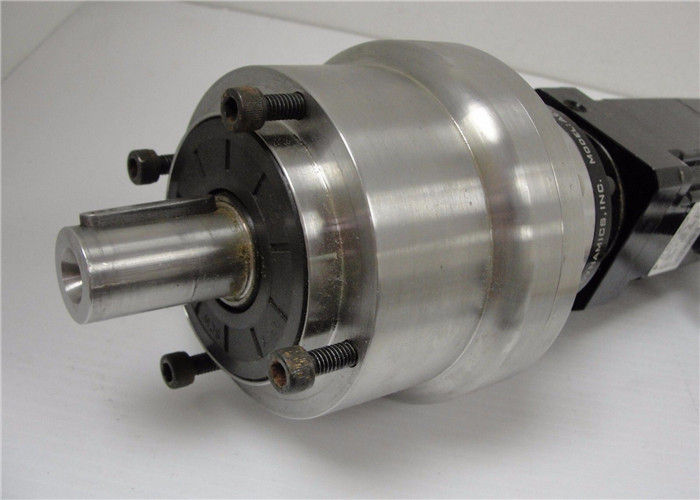
Peringkat Umum
Cuplikan Penilaian
Berikut ini adalah distribusi semua peringkatSemua Ulasan